
搜索结果: 1-15 共查到“知识要闻 计算机系统结构”相关记录542条 . 查询时间(6.103 秒)
中国科学院高性能路由验证和路由查找研究获进展(图)
高性能 计算机网络
2025/1/9
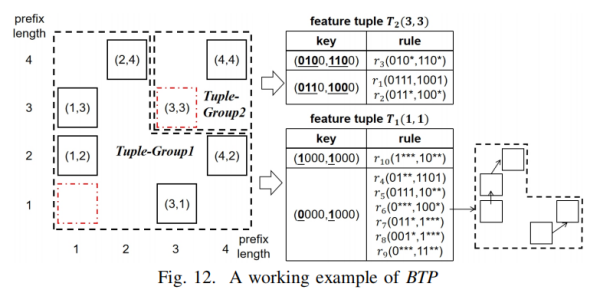
路由验证和路由查找是实现安全路由和高效转发的关键技术。随着网络规模和网络流量的持续增长以及大范围路由异常事件频发,路由查找和路由验证面临严峻的性能挑战。中国科学院计算机网络信息中心前瞻实验室团队围绕上述挑战开展研究。2025你月8日,三项成果被计算机网络领域的国际顶级期刊和会议录用。
海南大学计算机科学与技术学院沈笑老师的论文被CCF A类国际会议AAAI录用(图)
沈笑 CCF AAAI 跨网络节点
2025/3/10
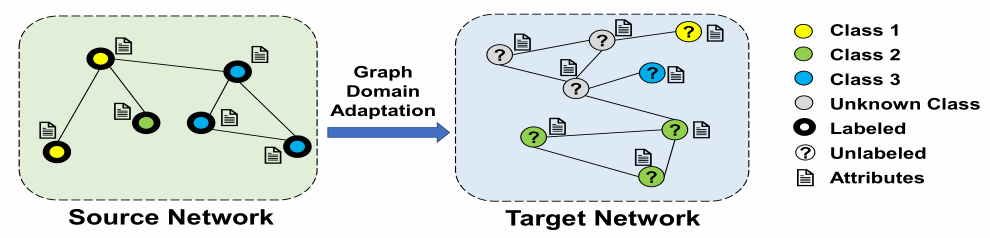
近日,海南大学计算机科学与技术学院智能软件与系统新技术研究团队沈笑副教授的论文被CCF A类顶级国际会议AAAI录用。AAAI是人工智能领域中历史最悠久、涵盖内容最广泛的国际顶级学术会议之一,也是中国计算机学会CCF推荐的人工智能领域A类国际学术会议。AAAI-2025国际会议在美国费城举办,共收到来自全球12957篇投稿论文,接受率为23.4%。
沈笑老师被AAAI-2025录用的论文题目为“...

中国科学院计算机网络信息中心在肿瘤生物信息学研究中取得新进展(图)
肿瘤 生物信息 计算机网络
2024/12/7
2024年11月12日,中国科学院计算机网络信息中心高性能计算部的科研人员基于前期研究基础,提出了一种基于深度学习的多尺度病理图像MSI预测方法:MSIscope。该方法以Transformer架构为基础,针对病理图像的多尺度特性和MSI的特定病理特征,设计了感兴趣区域选择、多尺度视野扩展和多分辨率特征融合等模块,高效定位并提取关键区域特征,融合跨区域、跨尺度的上下文信息,克服了现有方法的局限性。...

2024年全国大学生计算机系统与程序设计竞赛(简称CCSP竞赛)于10月23-24日在浙江金华举办,共有来自全国73所高校的423名参赛选手参赛。西安电子科技大学派出13名选手参加,经过长达12小时的激烈角逐,最终获得一金八银二铜,团体排名位列全国第七。

全国亚军!西安电子科技大学在首届中国研究生操作系统开源创新大赛中获佳绩(图)
亚军 操作系统 开源 创新大赛
2025/2/5
2024年10月22日至24日,由教育部学位管理与研究生司指导,中国学位与研究生教育学会、中国科协青少年科技中心主办,国防科技大学承办的“松山湖杯”第一届中国研究生操作系统开源创新大赛全国总决赛在湖南长沙隆重举行。本次大赛以“开源筑梦,研途创新”为主题,旨在服务国家高水平科技自立自强的战略需求,推动基础软件关键技术创新,培养拔尖创新型人才。在本届比赛中,我校获一等奖两项(含全国亚军一项)、二等奖一...

中国科学院国家授时中心完成国家重大科技基础设施西安-太原段光纤时间传递链路(图)
光纤 数据 性能
2025/2/21
2024年10月18日,中国科学院国家授时中心张首刚、刘涛研究员带领的课题组,完成了西安至太原段1839千米双纤双路时间传递系统的设备安装和性能测试,标志着我国建成了全球首个10皮秒级稳定度的千公里级光纤时间传递工程应用系统。相关成果以《Time transfer in an 1839-km telecommunication fiber link demonstrating a picoseco...

2024年9月7日,第九届“中国高校计算机大赛-网络技术挑战赛”全国总决赛在温州国际云软件谷圆满落幕。我院王晓康教授、刘迎冰副教授指导的学生团队作品《基于张量计算的工业轴承智能PHM系统》经过层层选拔,最终在本次大赛中荣获二等奖。此次成绩充分展现了我院师生团队的专业实力与创新能力,展示了学院在网络技术领域的教学成果和实践应用水平。
本届大赛由全国高等学校计算机教育研究会主办,温州大学承办,吸引了...

相场模型被广泛用于研究合金的微观结构演变,在理解、预测和优化对微观结构敏感的宏观材料特性方面具有优越性。弹性应变能是模拟固固相变中晶体结构形成的一个重要因素。传统上,弹性应变能是根据著名的哈洽图良(Khachaturyan-Shatalov)理论在倒空间计算得出的。然而,在大规模模拟中,全空间傅立叶变换成为瓶颈。
中科院上海分院城市环境研究所在利用效能指标评价图像分割模型性能方面取得重要进展(图)
城市环境 模型性能 评估
2024/8/28
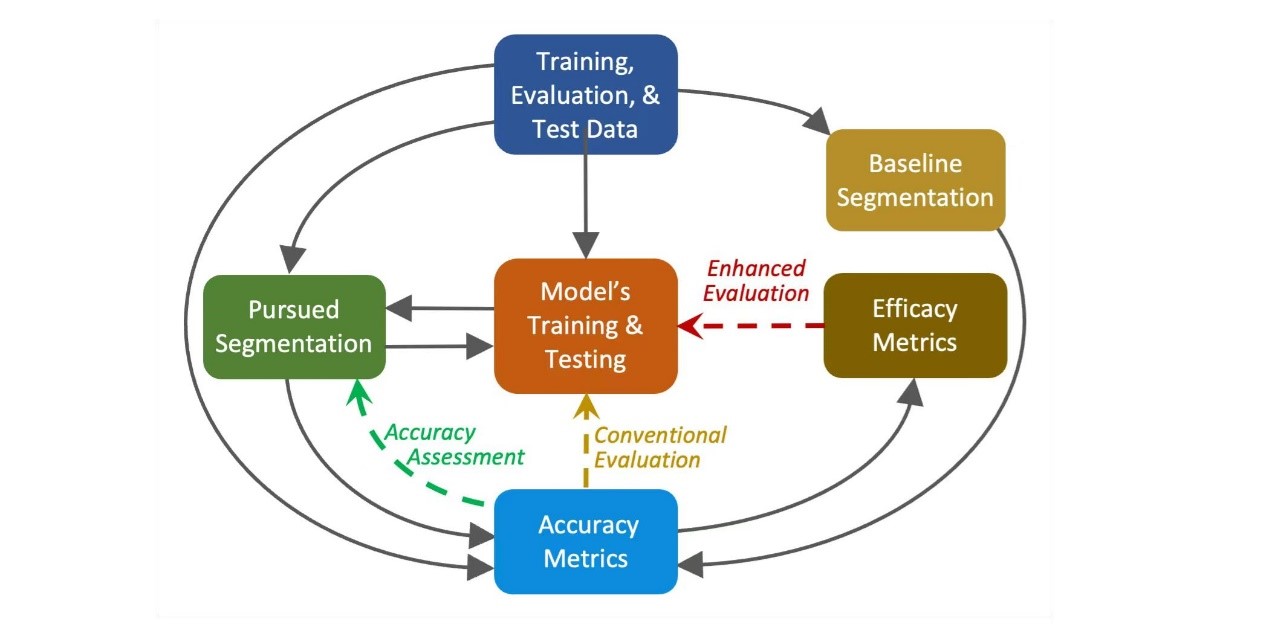
随着深度学习技术在图像分割任务中的广泛应用,如何准确评估模型性能成为了研究的重点和难点。传统的评估方法往往受限于类别分布的变化,导致评价结果出现偏差。对此,唐立娜研究员领衔的合作团队通过引入图像分类效能(Image Classification Efficacy, ICE)指标,提供了一种更为精细的评估框架,特别是在缺乏黄金标准的情况下。该研究系统应用ICE指标,旨在解决深度学习图像分割模型在面对...

CCF Computility2024倒计时5天|王兴伟教授、杨博教授和翟恩南教授邀你共话云际计算及算网协同先进技术(图)
CCF Computility 王兴伟 杨博 翟恩南 云际计算 算网协同 算力网 分布式系统
2024/9/18
由CCF主办,CCF分布式计算与系统专委会与吉林大学承办的CCF分布式计算大会(CCF Computility 2024) 暨全国开放式分布与并行计算学术年会(DPCS 2024) 将于2024年7月26日至28日在中国吉林省长春市举行,会议规模预计1000余人。本次会议主题为“算力网:新质生产力背景下的分布式系统”,旨在为分布式系统和算力网相关的从业者提供最专业的学术研讨、技术交流和成果展示的平...
CCF多位会员荣获2023年度国家科学技术奖
CCF 科学技术奖
2024/9/18
2024年6月24日,2023年度国家科学技术奖在京揭晓,共评选出250个项目。其中,国家自然科学奖49项,一等奖1项,二等奖48项;国家技术发明奖62项,一等奖8项,二等奖54项;国家科技进步奖139项,特等奖3项,一等奖16项,二等奖120项。信息领域有多位CCF专家获奖,CCF向荣获2023年度国家科学技术奖的会员表示热烈祝贺!

近日,第61届IEEE和ACM设计自动化大会(Design Automation Conference, DAC)在美国旧金山如期举办,会议隆重揭晓了本年度系统设计竞赛(System Design Contest, SDC)赛事结果。东南大学SEUer学生团队在DAC-SDC竞赛中名列榜首,第三次以“东大人”的身份荣获全球第一,成为该项赛事FPGA赛道有史以来唯一的“三连冠”得主。

2024年4月23日,南方科技大学统计与数据科学系副教授胡延庆课题组在国际学术期刊Nature Communications上以“Reconstructing the evolution history of networked complex systems”为题发表研究论文。该研究使用机器学习方法,能够高精确度地重构可网络化复杂系统的形成历史,并证明了任何不低于随机猜测的算法,对于足够大的网络...

2024年4月16日,世界模型的概念引发了广泛关注。我们首次提出了一种名为Drive-WM的全新多视图世界模型,旨在增强端到端自动驾驶规划的安全性。Drive-WM模型通过多视图世界模型,能够想象不同规划路线的未来情景,并根据视觉预测获取相应的奖惩反馈,从而优化当前的路线选择,为自动驾驶系统的安全提供了保障。Drive-WM是与现有端到端规划模型兼容的第一个驾驶世界模型。通过视图因子分解促进的联合...
2024年4月16日,世界模型的概念引发了广泛关注。我们首次提出了一种名为Drive-WM的全新多视图世界模型,旨在增强端到端自动驾驶规划的安全性。Drive-WM模型通过多视图世界模型,能够想象不同规划路线的未来情景,并根据视觉预测获取相应的奖惩反馈,从而优化当前的路线选择,为自动驾驶系统的安全提供了保障。Drive-WM是与现有端到端规划模型兼容的第一个驾驶世界模型。通过视图因子分解促进的联合...