
搜索结果: 1-15 共查到“知识库 交通信息工程及控制”相关记录366条 . 查询时间(2.439 秒)
《交通工程》投稿要求
交通工程 投稿要求
2022/10/11
《交通工程》(CN10-1468/U)(原《道路交通与安全》(CN11-3911/U))2000年创刊,由北京市科学技术协会主管,北京交通工程学会和北京工业大学共同主办,刊载内容涵盖交通规划、交通安全与心理、交通运营管理、交通控制、交通工程设计、道路工程、智能交通、交通信息、交通政策、交通行为、节能环保等交通学科方向。《交通工程》的宗旨是以交通行业需求为导向、以实践应用为重点、以理论研究为基础、以...
2021年度中国智能交通协会科学技术奖-城市交通领域获奖项目。科技进步奖:1、城市交通综合运行体征监测诊断技术与应用;2、城市路网级交通流决策支持与智能管控关键技术及应用;3、端云融合的涉车交通大数据分析与安全防控关键技术及应用;4、城市多模式交通运行状态实时预测与智能管理关键技术及应用;5、微波视频一体化交通智能感知终端研发及产业化应用;6、基于北斗定位系统的城市共享单车智能服务与精细治理关键技...
2021年度中国智能交通协会科学技术奖――自动驾驶与车路协同领域获奖项目介绍。科技进步奖:1、车路协同环境下多维度信息安全防护关键技术及应用;2、面向智能驾驶的交通场景数据标注平台关键技术及应用。技术发明奖:1、面向全时域的智能汽车感知与定位增强关键技术及应用。软课题研究领域:科技进步奖:1、综合交通运输工程科技中长期发展战略研究。
华南理工大学吴贤铭智能工程学院智能科学与工程专业介绍
华南理工大学吴贤铭智能工程学院 智能科学与工程 专业介绍
2022/7/27
智能科学与工程是在智能行为的理论和应用技术层面上,研究智能工业生产控制、数字楼宇与社区、智能机器人技术、智能交通、智能物流、智能电网等方向领域的一门科学智能科学与控制理论与控制工程、检测技术与自动化装置、系统工程、 模式识别与智能系统,导航、制导与控制,生物信息学,建模仿真理论与技术都是控制科学与工程领域的基础学科,也是模式识别、图像处理、大数据挖掘,机器学习交叉的重要学科。
智慧高速公路多功能路侧设施一体化集成关键技术及应用
智慧高速公路 多功能路侧设施 一体化
2022/10/10
为解决高速公路感知范围小、漏报率高、检测率低、只能覆盖单向、布设成本高等问题,项目开展了路侧系统多元信息融合感知技术攻关、路侧系统布设优化方法研究和路侧集成设备研发工作。成果攻克了路侧视频和雷达数据空间、时间维度融合及定位精准无偏移的快速匹配技术,构建了路侧系统感知、通信、控制节点布设优化模型,设计研发了多功能路侧系统集成智能杆,提出了远距离、高精度、低成本的路侧系统建设工程解决方案。研究成果在成...



哈尔滨工业大学交通科学与工程学院科研成果整合大数据挖掘与路网脆弱性评估的疏散交通管理研究。

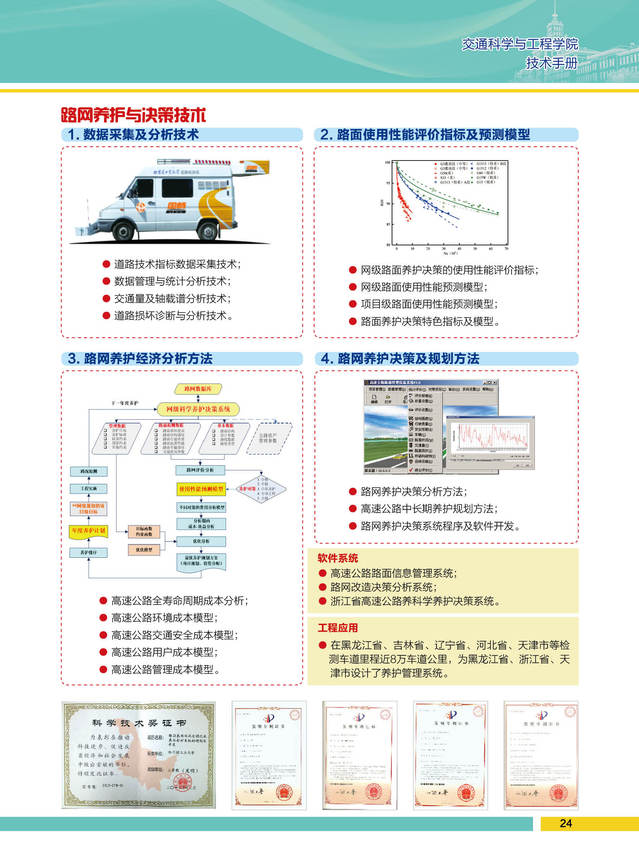
哈尔滨工业大学交通科学与工程学院科研成果路网养护与决策技术。
现实中城市交通流的运行具有很强的非线性特性,采用简单的线性模型难以全面描述交通流的实际运行过程.本文在考虑城市交通流非线性动态特性的基础上,提出了一种非线性交通流排队模型,并基于宏观交通流固有的周期性特征,设计了交叉口信号的迭代学习控制策略.通过对交叉口信号的迭代学习控制,使交叉口各进口道的车辆排队长度尽可能趋于均衡,提高交叉口信号有效绿灯时间的利用率,从而提高路网的通行效率.最后通过严格的数学推...
考虑车辆跟驰作用和通信时延的网联车辆队列轨迹跟踪控制
智能网联车辆 轨迹跟踪 跟驰作用 通信时延
2024/1/19
针对智能网联车辆轨迹跟踪问题,本文通过考虑车辆跟驰作用和车车通信过程中存在的通信时延,提出了一种分布式非线性轨迹跟踪控制器.具体来讲,首先,提出一种双向领导跟随通信拓扑来描述智能网联环境下车辆间的通信连接.其次,考虑车辆跟驰作用和通信时延,设计一种分布式非线性轨迹跟踪控制器.然后,使用Lyapunov方法证明了所设计控制器的稳定性.最后,考虑速度干扰作用于领导者车辆,针对无时延、同质时延和异质时延...
结合智能车面临的横向安全问题,设计了一种具有横向安全性的智能驾驶员模型.该系统由转向控制、速度控制和决策规划三个模块组成.该系统的主要作用包括:一是通过在转向控制中加入主要约束提高车辆在转向过程中的横向稳定性,减小车辆发生侧滑、侧倾、侧偏等风险;二是在换道场景下,决策规划单元合理分析交通环境中的车间距并计算出驶入临近车道的速度和轨迹,使智能车实现安全换道.CarSim/Simulink仿真结果表明...
高速列车非线性系统的分数阶有限时间控制器设计
分数阶有限时间控制器 高速列车 不确定性 执行器故障 非线性
2024/1/22
针对具有输入非线性,不确定的气动阻力,未知的车间力,外部扰动以及未知的执行器故障等特征的高速列车非线性系统,结合分数阶稳定性原理以及有限时间控制理论,本文设计了一种分数阶有限时间控制器以实现高速列车更快速且更高精度的跟踪控制.该控制器能够直接补偿高速列车的不确定性和非线性以及执行器故障而不需任何“试错”过程,且稳定时间可由控制参数的不同选择来调整.仿真研究验证了所设计控制器的有效性和优越性。