
搜索结果: 1-6 共查到“机器人控制 U.S. science”相关记录6条 . 查询时间(0.289 秒)
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:基于阻塞效应的可变刚度结构和材料在软体机器人领域中的应用
阻塞效应 可变刚度结构 材料 软体机器人
2023/11/29
软体机器人是智能机器人领域中的新兴方向,以其可大范围变形、可变材料性质的物理特征和复杂环境适应性强、人机交互安全性高的应用优势而受到广泛关注。基于阻塞效应(jamming transition)的可变刚度性质是软体机器人独有的全新属性,从材料上赋予了机器人“刚柔并济”的能力,不仅能增强机器人适应不同工件或者周围环境的能力,还可应用于人机交互的机器人以提高安全性。和其他软体机器人可变刚度基于阻塞效应...
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:受人启发机器人与对类人人形机器人的思考
机器人 类人人形机器人 人工智能
2023/5/4
普通机器人高性能作业能力是机器人领域核心问题之一,也是其广泛高端应用的主要瓶颈。基于人类整体性能高于单元性能的机理,通过模拟人的神经机制与结构机理,研制受人启发的机器人系统,是在有限本体精度和有限传感精度下实现机器人高性能作业的有效途径。本报告将结合中国科学院自动化研究所机器人理论与应用团队的研究工作,对受人启发机器人研究的初步进展进行简要介绍,以期能够对未来类人人形机器人的研究带来启发。
膀胱功能障碍(Underactive Bladder,UAB)是由于衰老、神经损伤、代谢综合征等原因导致的最常见的器官功能障碍之一。其临床表现为尿流缓慢、排尿困难、膀胱排空不全等,极大影响患者生活质量。严重时UAB会引起上尿路积水及肾功能衰竭等严重并发症,危及患者生命。UAB患者人群庞大,国内外多项流行病学研究证实,膀胱功能障碍的发病率约为10-23%,在70岁以上老年人群体中可高达42%-45%...
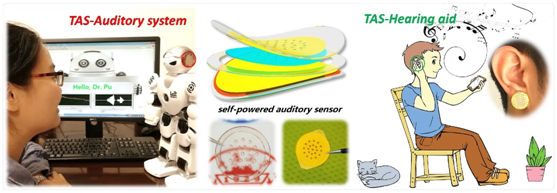
重庆大学物理学院胡陈果教授科研团队与中科院北京纳米能源与系统研究所王中林院士团队合作,在美国科学促进会出版的《Science Robotics》(Science 子刊)上发表了题目为“一种可以作为社交机器人和助听器件的高灵敏自驱动摩擦电听觉传感器件” 的研究论文,重庆大学为第一署名单位。
NSF to host ‘Arc of Science’ event on Capitol Hill
NSF host Arc of Science event Capitol Hill
2017/3/13
On Feb. 15, the National Science Foundation (NSF) and the Coalition for National Science Funding (CNSF) will host "The Arc of Science: Research to Results," an event on Capitol Hill to highlight for n...
National Science Foundation and federal partners award $37M to advance nation's co-robots
National Science Foundation federal partners award $37M nation's co-robots
2015/12/22
Today the National Science Foundation (NSF) -- in partnership with the Department of Defense (DOD), the Defense Advanced Research Projects Agency (DARPA), theNational Aeronautics and Space Administrat...